LAIR - A* Path Planning
Hi everyone! My name is Alicia Lu, a rising sophomore working in the LAIR (Lab for Autonomous and Intelligent Robotics). This summer I have been working with my fellow classmates and Prof. Clark on developing a multi-AUV system to track sharks while simultaneously collecting marine habitat data.
My job on the path-planning team is to modify the classic A* search algorithm (often seen as an extension of the famous Dijkstra Algorithm) to include our expected functionalities: track sharks of fixed positions and cover as many new habitats as possible. I have developed two versions of path planning algorithms that can complete the listed tasks.
This post shows the simulation results from the algorithm that aims to explore as many new habitats as possible while trying to maximize time spent in each habitat. The longer time spent in a habitat implies longer trajectory length within a habitat. Figure 1 below illustrates a trajectory that starts at (-215.63, -5.89) and has a length of 71 nodes.
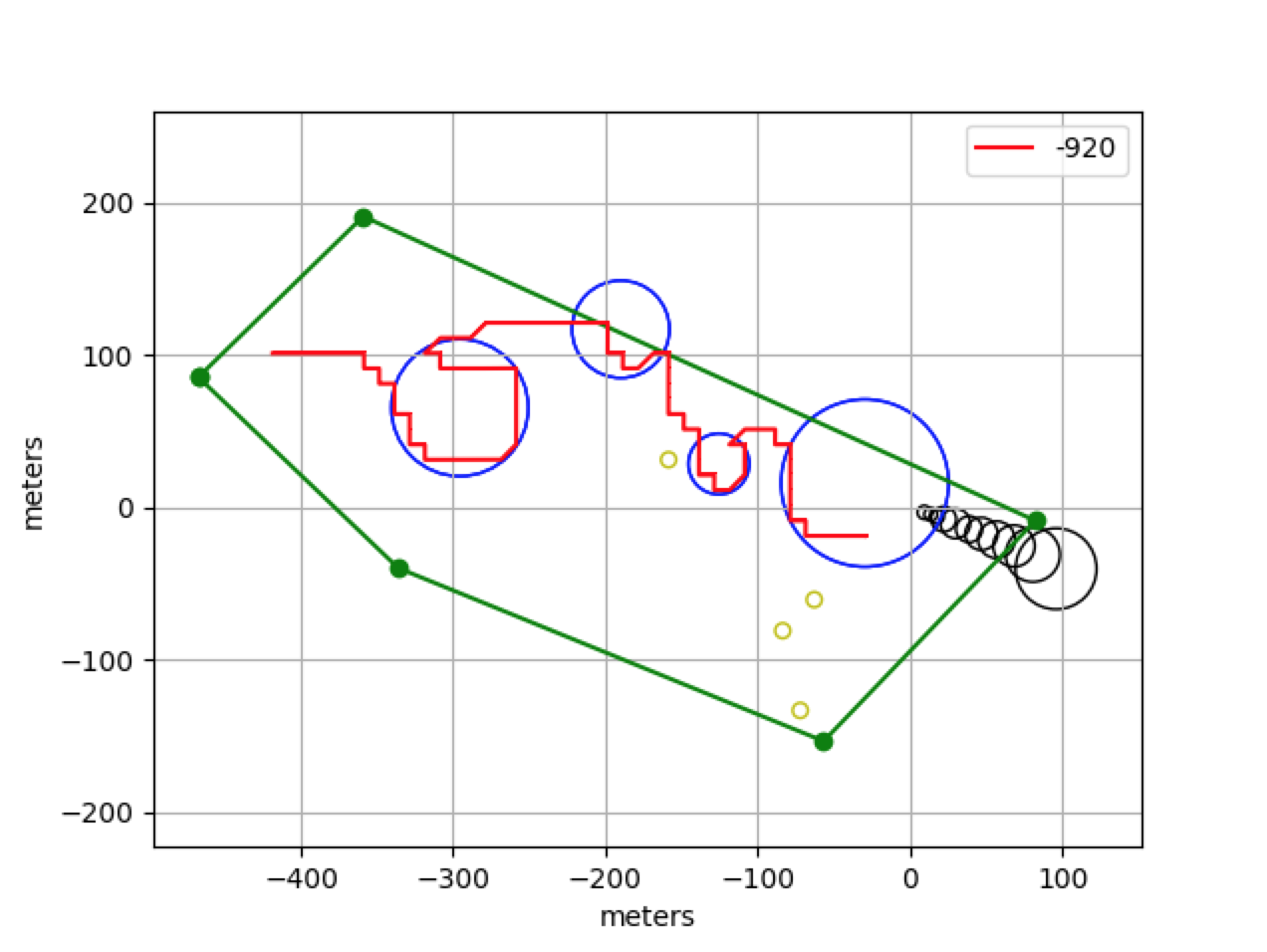
However, as you may notice, the zigzags led to great inefficiency in terms of getting to the next position, which was why I decided to postprocess the generated trajectory by smoothing it. The trajectory can be smoothed if we deleted intermediate nodes outside of the habitats (remember we still want the length inside the habitats to be long).
Figure 2 shows the smoothed path in Figure 1.

Comments
Post a Comment