LAIR - Path Planning
Hi Everyone,
I am Linda Li, a rising sophomore from Harvey Mudd College. Over the past weeks, I have worked in Lab for Autonomous and Intelligent Robotics (LAIR) under the supervision of Prof Clark. I am excited to share some of my progress with you all.
I am working on Shark Tracking with AUVs (Autonomous Underwater Vehicle) project, where we want to develop a multi-AUV system to track tagged sharks for a long period of time.
At the beginning of this summer, I explored and implemented path planning algorithms such that AUVs will be able to plan the optimal path from current positions to the target sharks while avoiding obstacles along the way. I focused on the Rapidly-exploring Random Tree (RRT) algorithm. This algorithm finds the path from the starting point to the goal by iterating the process of randomly choosing a point in the whole space, connecting this point with the closest point in the tree, and testing if the new subpath is collision-free with any obstacles until it hits the goal. Here is some interesting visualization of the RRT algorithm: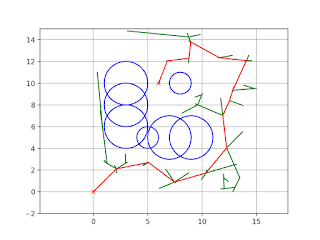



Next, I started to design better algorithms such that we can explore the environment while keeping a relatively close distance from tagged sharks. I am still exploring different cost functions to consider and improvements of RRT algorithm so that we can minimize the cost function efficiently.
Comments
Post a Comment